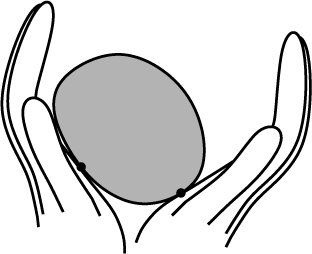
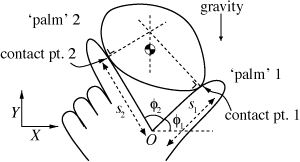
Майкл Ердман і я розробив метод, щоб відновити форму невідомого об’єкта за допомогою тактильних датчиків, не вимагаючи об’єкта іммобілізації. Замість того, щоб робот маніпулює об’єкт без схоплюванню. Робот виводить форму, рух і центр мас об’єкта, заснованого на русі точок контакту, як виміряно за допомогою датчиків тактильних. Це дозволяє природним, безперервне взаємодія між маніпуляцією і зондування. Зрештою, він буде робити роботів більш здатними в фізичному світі, дозволяючи їм підібрати невідомі об’єкти.
Ми проаналізували декілька різних випадків тактильне завдання відновлення форми. По-перше, ми розглядали плоскі форми з квазистатических динамікою. Моделювання та експерименти підтверджені аналітичні результати. Далі, ми розширили аналіз на повній динаміці і довести спостережливості нелінійної системи, яка описує форму і рух об’єкта маніпулюють. У нашому моделюванні, простим спостерігачем на основі методу Ньютона для знаходження кореня може відновити невідомі форми з майже незначними помилками. Використовуючи ту ж структуру ми можемо описати форму і динаміку тривимірних об’єктів. Проте, існують деякі фундаментальні відмінності між плоскими і тривимірному випадку, через підвищену дотичній розмірністю. Крім того, досконала глобальна реконструкція форми неможливо в 3D випадку, але це майже тривіально, щоб отримати верхні і нижні межі форми. Метод 3D реконструкції форми також була реалізована, і ми наведемо деякі результати моделювання.
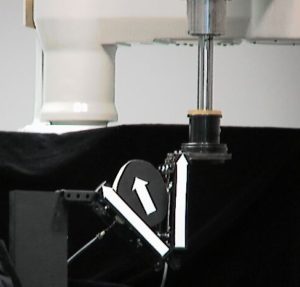
Нижче картина експериментальної установки. Вона здійснюється за допомогою адептом руки робота рухається навколо двох долонь (позначено з довгими білими стрілками). Об’єкт також відзначений стрілкою. Це робиться для того, щоб ми могли відчути “підсупутникових” з адепта системою бачення і порівняти його з формою і рухом відновлення від тактильних даних.
У трьох вимірах нам потрібні три долоні:
Наступні фільми показують простий рух невідомого об’єкта, що катається на трьох стаціонарних пальм і реконструйованих кривих, прохідний контактними точками. Опукла оболонка кривих забезпечує нижню межу форми об’єкта.
Близькі за темою публікації
1.Марк Moll і Майкл А. Ердман. Реконструювати форма і рух невідомих об’єктів з активними тактильні сенсори. В Жан-Даніель Boissonnat, Джоел Бёрдіком, Кен Голдберг і Сет Hutchinson, редактори, алгоритмічних Основи робототехніки V, Springer Трактс в Advanced Robotics, стор. 293-310, Springer Verlag, 2004.[PDF]
2.Марк Moll. Форма Реконструкція з використанням активних тактильні сенсори. доктор філософії Теза, інформатики Департаменту, Університет Карнегі-Меллона, Піттсбург, штат Пенсільванія, 2002. [PDF]